Curiosity Blog, Sols 4927–4933: Let’s Drive to That Smooth Area

NASA...
4 min read
Curiosity Blog, Sols 4927–4933: Let’s Drive to That Smooth Area

By Susanne P. Schwenzer, Professor of Planetary Mineralogy at The Open University, UK
Earth planning date: Thursday, June 18, 2026
In the area Curiosity is currently exploring, the science team has mapped several areas with different-looking surface texture on the orbital images. If you wanted to have a look yourself at what there is to see, check the “Where is Curiosity?” map. You’ll discover different shades of orange and beige as well as more rough and more smooth-looking textures. This is what the geomorphologists in our team use to map the areas for exploration by the rover. Of course, we then supplement this all with ground-based images, including bespoke “drive direction imaging,” which is taken after each drive by the Mast Camera. Drive planning is done using a combination of all this information. So there shouldn’t be any surprises, right?
On Monday the team planned three sols in preparation for a Thursday planning to account for the U.S. federal holiday weekend. The workspace turned out to be a little spiky, so we could not find an area we could DRT. APXS still found one good bedrock target, “Rio Baker,” which also had MAHLI documentation. In addition, ChemCam investigated “Rica Aventura,” a textured bedrock, and “Tabebuia,” a darker-looking individual block, using its LIBS and conducted a passive spectral observation on a second dark float block called “Lago Ranco.” Of course, the team also wanted to look into the distance with ChemCam remote imaging, extending our investigation of the Cordillera base outcrop.
Imaging is always high on the list. In Monday’s plan Mastcam is looking into the modern dunes with the “Tacaza” mosaic, and with more mosaics looking forward to the future parking areas, some of which looked really smooth from that vantage point. We also continue our environmental and atmospheric observations looking for dust devils, the opacity of the atmosphere, and monitoring pressure and temperature. After all this, the rover drove about 35 meters (about 115 feet) to an area that looked really smooth in all images we had available at that point. So we were hoping for a good spot to deploy the DRT, but didn’t think we could be in for a surprise.
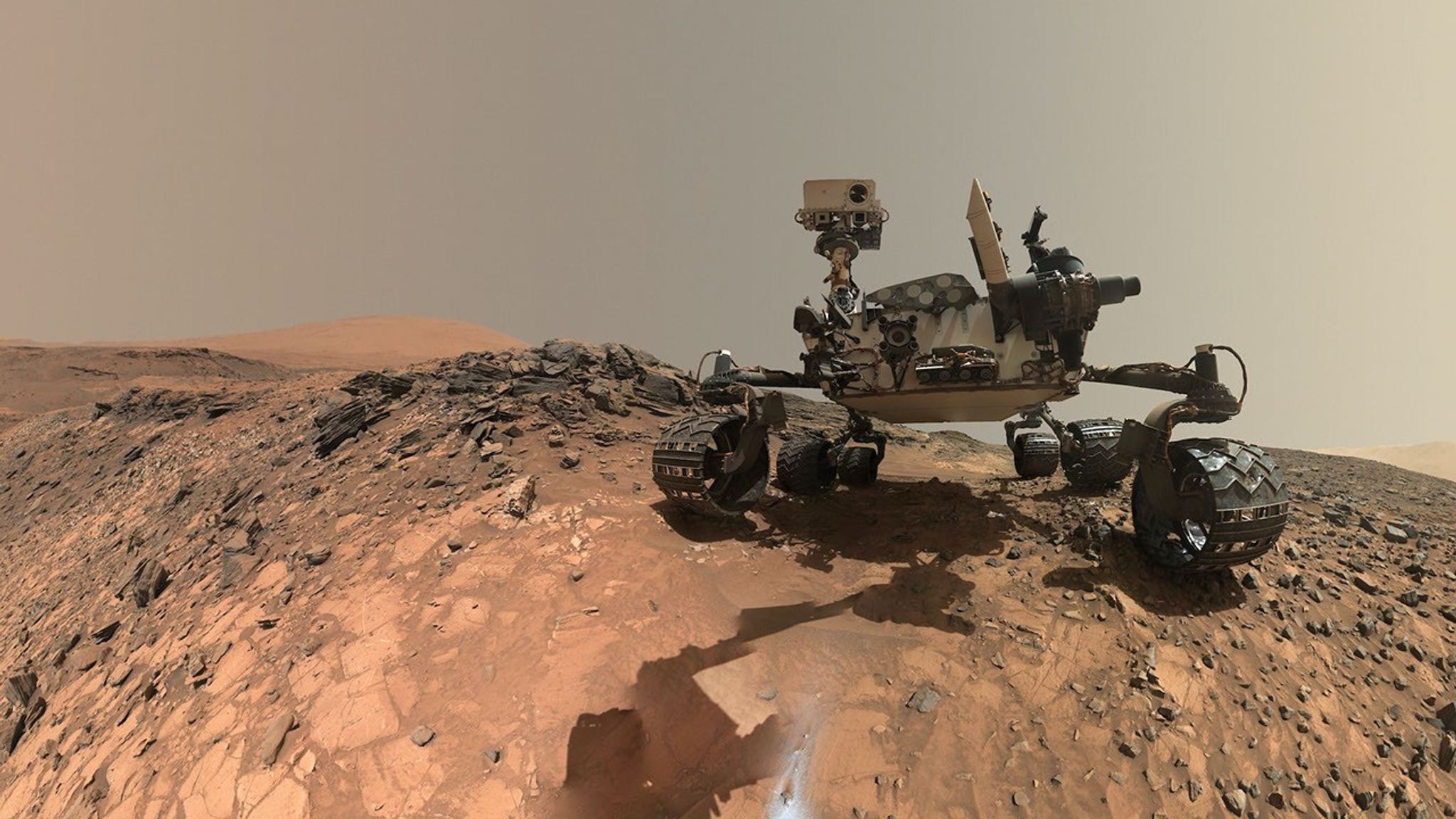
The drive ended exactly as planned, spot-on in the middle of that — from a distance — smooth-looking area. But when we opened the post-drive images on Thursday morning, we were all reacting with a lot of surprise. From up close, the parking spot looks anything but smooth. You can see the surprise in the title image of this blog. There are polygons, veins, lamination, and probably more, once we inspect the higher-resolution images taken today. “Higher-resolution” is the key for why we were in for such a surprise! The features are quite small, a few centimeters across, and therefore we could not see them in the orbital images or from a distance in our navigation and mast camera images. The camera resolution from a distance just isn’t enough to see them. But up close, the terrain revealed all its beauty! And I am sure there will be more in the even higher resolution of today’s MAHLI and ChemCam RMI imager images!
So, what did we plan after we caught our breath on Thursday? First, you guessed it, images, images, and more images. Mastcam takes a full panorama with its “left eye” and adds a range of closer-up mosaics with its higher-resolution “right eye.” In addition there is a ChemCam Remote Micro Imager image to document structures further afield at high resolution. ChemCam is investigating three targets using LIBS: “Rio Chimore” is a lighter-toned band; you can see some of those in the cover image of this blog, too. The other two LIBS targets are “Rio de Lava,” a vein target, and “Rio de Salta,” one of the polygons. APXS is also looking at the bedrock and the ridges, at the targets “Pampa Grande” and “Iquique Ridge.” MAHLI is having the above-mentioned close “hand lens” look. Let’s see what we will discover when we get those images.
Finally, Curiosity drove up the hill along very smooth-looking terrain that is just littered with tiny polygons. Let’s see if we are in for another surprise reverberating around all our offices — and across two continents, as I had the good fortune to be among the first ones, here in England (Or maybe it was our French ChemCam colleagues, who are in a time zone one hour ahead of me?). Whichever it is, this terrain has a lot to say about the geologic history of Mars!
Want to read more posts from the Curiosity team?
Want to learn more about Curiosity’s science instruments?